
Pôle Occitanie
Direction
Directeur : Laurent Berquez – IUT A- Paul Sabatier Directeur adjoint : Alain Daidié – Institut National des Sciences Appliquées de ToulouseEtablissements membres


L’Usine École, un outil d’accélération de la R&D pour l’Industrie de demain ?
La Plateforme d’Accélération vers l’Industrie du Futur d’Occitanie – PAd’Occ, en collaboration avec le réseau S.MART et le LAAS-CNRS, a le plaisir de vous inviter à la première édition des journées PAd’Occ de l’Industrie du Futur le vendredi 23 septembre de 9h à 16h – Maison de la Formation Jacqueline Auriol – 1 rue Tarfaya, 31400 Toulouse
Cette journée sera l’occasion d’échanger sur le rôle de l’Usine-École en tant qu’outil d’accélération, en support à la recherche et développement, pour porter à maturité des solutions et technologies issues de laboratoires et permettra de :
• Découvrir PAd’Occ, la Plateforme d’Accélération vers l’industrie du Futur d’Occitanie, ainsi que d’autres plateformes d’accélération du Grand Sud
• Visiter l’Usine-École située à la MFJA et des démonstrateurs
• Échanger autour d’une table ronde sur les synergies possibles entre acteurs de la recherche, académiques et industriels, dans un objectif d’accélération de la R&D sur la base d’un outil tel qu’une Usine-École.

Livraison du projet UPSSITECH réalisé à l’aide des ressources de S.mart Occitanie
20 étudiantes et étudiants de la spécialité SRI de l’école UPSSITECH ont présenté en public leur projet de grande envergure réalisé à l’aide des ressources du pôle Occitanie, en partenariat avec la société eXcent, concepteur et intégrateur de solutions industrielles.
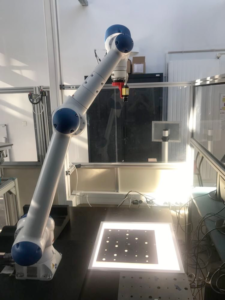
Il s’agit de commander le déplacement d’un cobot industriel pour l’identification de formes afin de localiser, détecter et analyser des perçages sur des surfaces métalliques.
Un cobot 6 axes pourvu d’une caméra observant une plaque métallique percée a été utilisé. Après analyse des images issues de la caméra, le robot se positionne au-dessus des trous identifiés afin d’effectuer des opérations : vissage, rivetage, etc. Le démonstrateur est également équipé d’une IHM de contrôle qualité des trous afin de détecter toute anomalie.
Ce projet a été développé grâce au middleware ROS qui a permis de répondre à moindre coût aux problématiques de planification de trajectoires, de simulation physique, de commande référencée vision mis en jeu dans le projet. Les IHMs ont été développées sous Windows et communiquent avec le middleware ROS grâce au package ROS-Bridge.
La MFJA reçoit ses premiers étudiants au sein du pôle de ressources Occitanie.

Activités de formation et de recherche
Le pôle Occitanie est une plateforme technologique visant à favoriser la professionnalisation des formations de mécanique, de robotique et de productique en général en mutualisant auprès des établissements du territoire Occitanie, les matériels et outils numériques de l’Industrie du Futur, ainsi que les compétences des personnels techniques et des experts du réseau S.mart.
Ce lieu favorise également le transfert et la mise en œuvre de concepts avancés de recherche, en lien avec les laboratoires ICA, IRIT et LAAS-CNRS de la région toulousaine, vers l’enseignement et les entreprises.
Le pôle est constitué de 2 plateaux technologiques. Le plateau mécanique, localisé à l’INSA, offre les applications et les ressources matérielles permettant d’illustrer les problématiques de conception, de fabrication, de métrologie et d’optimisation de structures. Le plateau de production, localisé à l’UT3, est composé de convoyeurs, de systèmes de perception visuelle, de robots industriels, de cobots et de robots mobiles. Il offre une collection d’outils logiciels permettant d’illustrer, à échelle réduite, les diverses problématiques mises en jeu au sein de l’Industrie du Futur (contrôle commande, simulation, supervision, jumeau numérique, robotique, sécurité, intégration numérique).
Par ailleurs, le pôle S.mart Occitanie a été labellisé ROS-Academy par le consortium ROSin . Il délivre des formations initiales, continues et actualisantes dans le domaine de la robotique mettant en évidence le bénéfice du middleware gratuit et open source ROS (Robot Operating System). ROS offre un vaste ensemble de ressources logicielles, fruit de dizaines d’années de développement, utile à accélérer le développement d’applications robotisées complexes dans l’industrie. L’ensemble des matériels du plateau production est ainsi intégré sous cet environnement numérique.
Ressources technologiques spécifiques
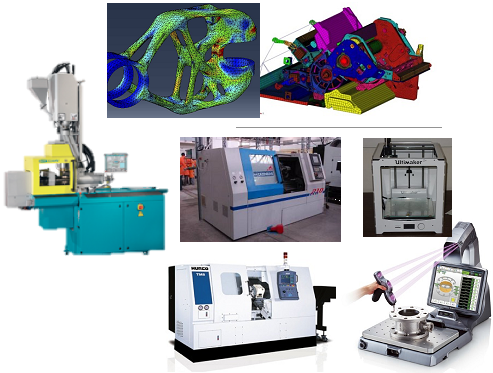
Le plateau mécanique dispose des outils de conception moderne, dont en particulier la suite 3D-Expérience de Dassault-Systèmes, les logiciels Simulia ABAQUS, la suite Patran/Nastran, la suite CREO et Hyperworks. Il dispose en outre de moyens de fabrications divers : machines à commande numérique, impression 3D, presses à injecter, micro-fonderie ainsi que des outils de metrologie fixes et portatifs.

Le plateau production dispose d’une cellule flexible composée de quatre modules de travail desservis par un système de transport Montrac. Chaque module de travail est constitué d’un robot associé à un système de vision. L’ensemble est commandé par des automates programmables industriels Modicon M340. Ces automates sont connectés au middleware ROS qui permet d’intégrer les divers éléments de la cellule de production ainsi que les différentes fonctions. Les robots industriels disponibles sont : 1 Stäubli RX60, 1Kuka KR 6 R700, 1 cobot YASKAWA HC10, 1 robot Baxter de Wanny Robotics, 1 robot manipulateur mobile TIAGO de la marque PAL ROBOTICS et 1 base mobile PAL ROBOTICS.
